
12 February 2025
As the name indicates, GRFs are forces, so let’s start there. A force involves a pushing (compressive) effect or a pulling (tensile) effect between two animals or objects (Figure 1).

The arrows in Figure 1 show a pushing force and a pulling force which act in opposite directions on the donkey. It is a characteristic of forces that they not only have a certain size or magnitude, but they also act in a specific direction. The magnitude and direction of a force can be represented by an arrow known as a vector. The length of the vector is proportional to the magnitude of the force, and it points in the direction in which the force acts.
Locomotion is an essential part of the horse’s life. In feral horses, locomotion is necessary to find food and water, escape predators and find a mate. Domesticated horses are provided with care and protection, and their locomotor skills are channelled into athletic and sporting endeavours.
We recognize a superior equine athlete by observing their movements but none of these movements are possible without the application of forces. Do you recall Newton’s Third Law of Motion? It states that for every action there is an equal and opposite reaction. Applying this to a moving horse, when the hoof presses against the ground, the ground pushes back against the hoof with a force of equal magnitude acting in the opposite direction – that is the GRF.
Some facts about the GRF:
In every stride, each limb has a stance phase and a swing phase. In the swing phase, the entire limb is pulled forward (protracted) and our eye is drawn to the extravagance of the limb movements. During the stance phase, the limb interacts with the ground to generate GRFs. Train your eye to watch what happens when the limb is in the stance phase. Look at whether the bones and joints are correctly aligned and the stability of the joints when they bear weight.
The GRF acts in three dimensions which allows it to generate and control the horse’s movement in all directions. Vertically, it opposes the effect of gravity that is always pulling the horse downwards and it can project the horse upwards into a lofty suspension or over an obstacle. Longitudinally, the GRF is responsible for generating and controlling forward and backwards motion. Transversely, the GRF turns the horse and produces lateral movements.
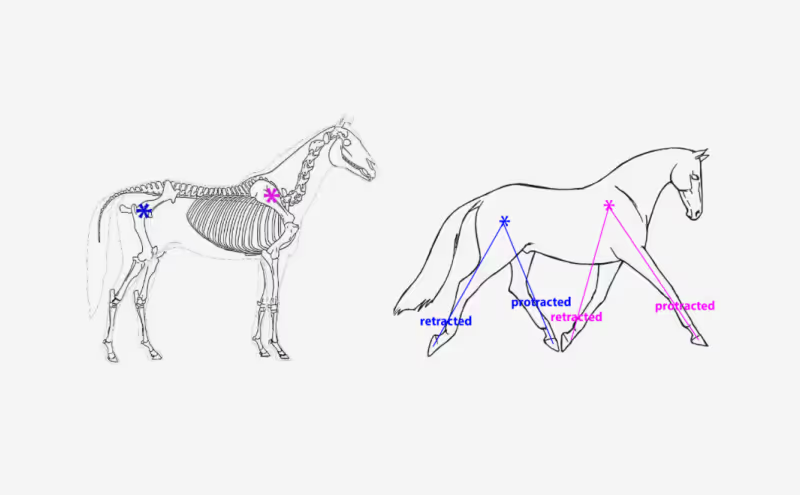
Most forms of human transportation rely on wheels that roll over the ground. Instead of wheels, horses use their legs one after another in a sequence that varies according to the gait. Each limb, in turn, swings forward, the hoof contacts the ground in a protracted position, and then generates GRFs to support the body as it moves forward over the grounded limb. As the body moves forward the limb is retracted until it is eventually pulled off the ground into the next swing phase. Therefore, the limbs alternate between protracting in the swing phase and retracting in the stance phase.
The forelimb rotates around a point about one-third of the distance down the scapula and the hind limb rotates around the hip joint (Figure 2). A line drawn from the rotation point to the centre of the hoof can be used to represent the limb position as it is protracted and retracted.
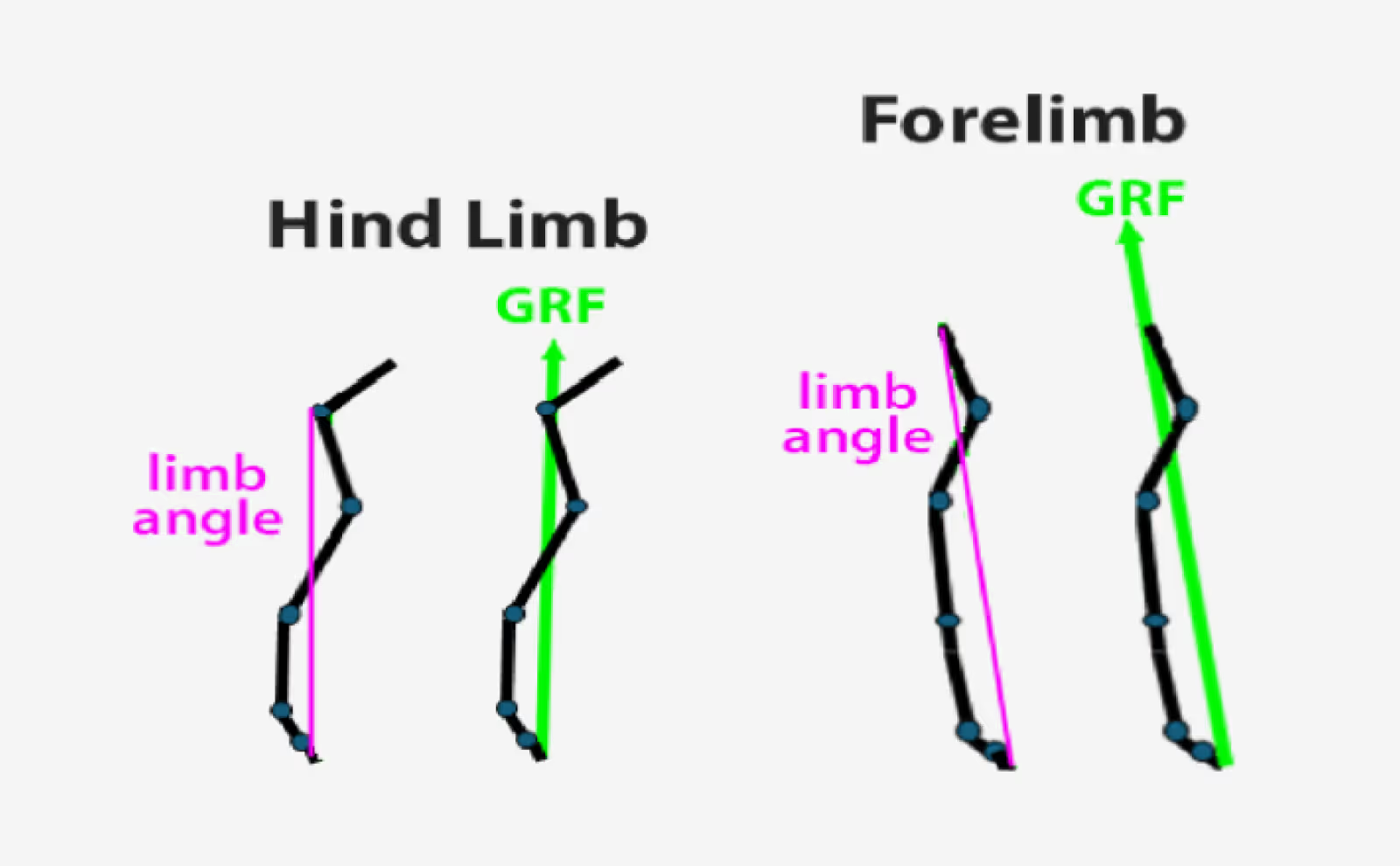
During the stance phase, the GRF vector is shown as an arrow that originates below the hoof, is proportional in length to the magnitude of the GRF and is aligned along the direction in which it acts (Figure 3).
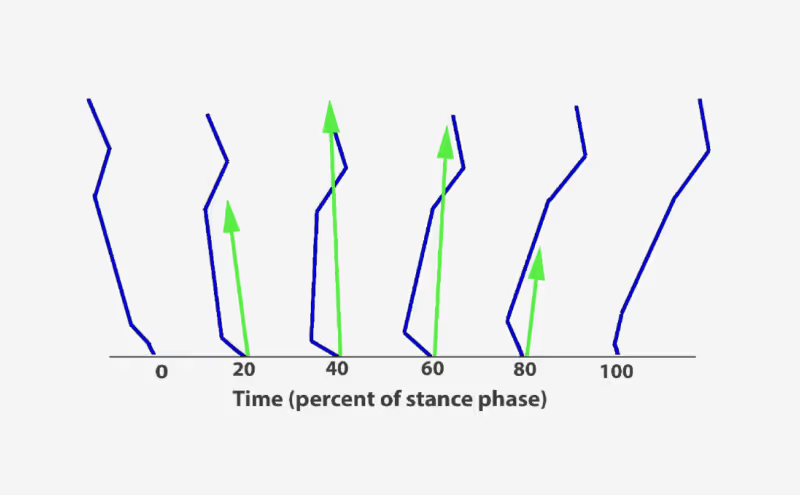
The GRF vector always points upwards because it opposes the effect of gravity throughout the stance phase. The angle of the vector to the vertical indicates its effect on forward motion. Around the middle of the stance phase, the vector points vertically indicating that all the force is directed upwards. Prior to that time, the vector points backwards and upwards, which has a braking effect. After that time, it points forwards and upwards which indicates propulsion (Figure 4).
In general, the hind limbs generate more propulsion, and this is controlled by the forelimbs which are responsible for turning and speed control. GRFs from the different limbs are combined in various ways during the coordination patterns in different gaits. We’re going to focus on the trot because this is an important gait for evaluating both quality of movement and asymmetries indicative of lameness.
In trot, movements of the diagonal limb pairs are synchronized which gives the gait a two-beat rhythm. Suspension phases, when the horse is airborne, intervene between diagonal stance phases giving the impression that the horse is bouncing over the ground. Large propulsive GRFs must be generated during the diagonal stance phases in order to launch the horse into the air. When the horse descends into the next diagonal stance phase, the downward momentum must be overcome by large GRFs during the loading phase (Figure 5).
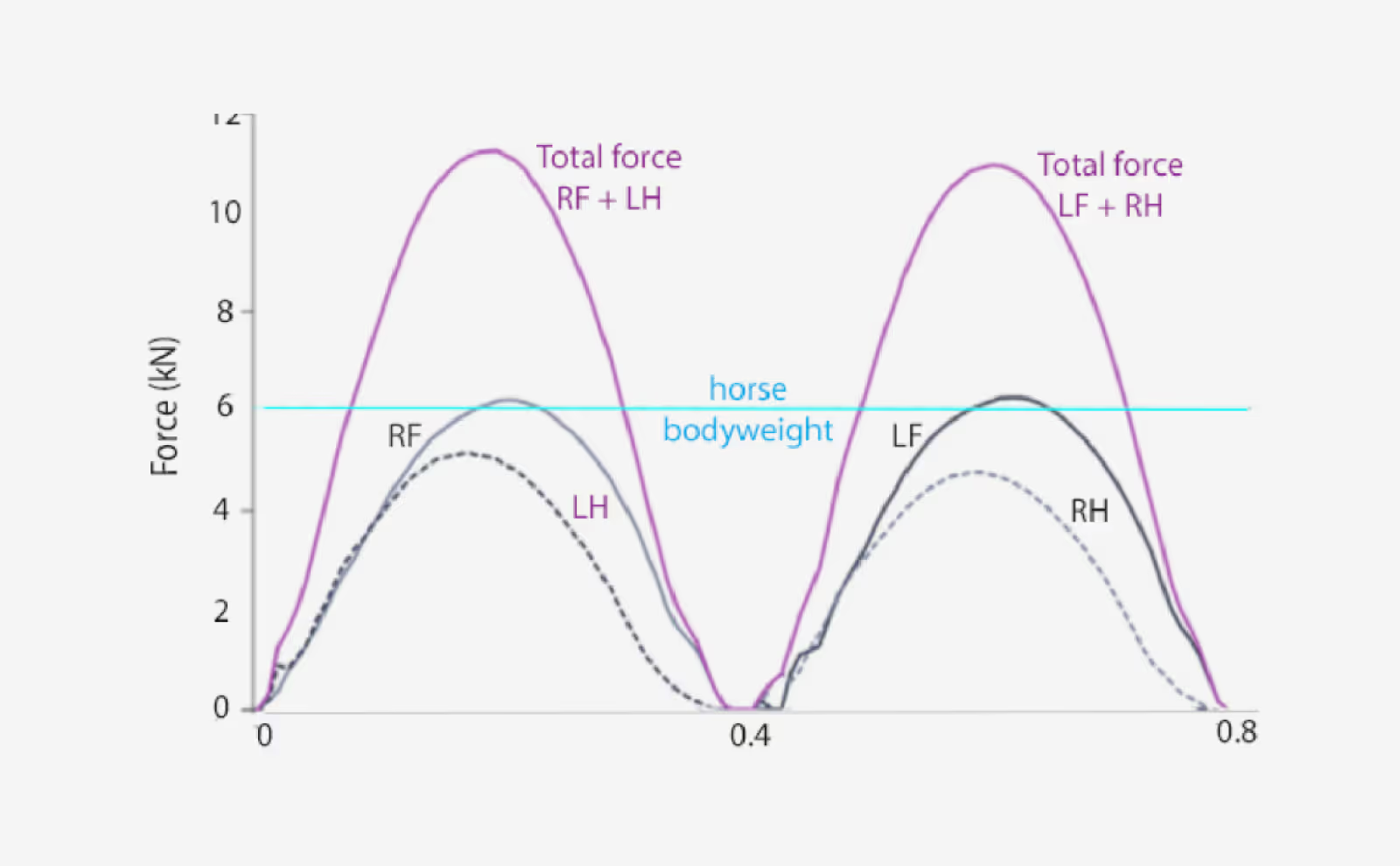
Things to note on Figure 5:
In trot, the entire body of the horse – head, neck and trunk - rises in the suspension phases. The height achieved is determined by the propulsive impulse (total force) generated during the stance phase, which varies between breeds and individuals within a breed. Warmbloods that move with a lofty suspension phase generate larger GRFs than Quarter Horses that have no suspension phase in their jog trot. When jumping a fence, large vertical forces are generated first in the forelimbs, which act like a pole vaulter’s pole to elevate the forehand, and then the hind limbs provide the force to propel the horse forwards and upwards over the fence. Cantering uphill requires large propulsive GRFs from the hind limbs in every stride and is a great way to develop strength in these muscles.
The GRFs are responsible for how the horse’s body moves. Knowledge of the GRFs tells us a lot about the resulting movements and, conversely, knowledge of the movement pattern allows us to make inferences about the GRFs generated by the limbs to produce the movement.
GRFs have been described as the gold standard for detecting lameness but the techniques used to measure GRFs, such as force plates, are not readily available in veterinary practice. Instead, we use body movements produced by the GRFs as a proxy for the GRFs.
In the trot, we expect the two diagonals to produce similar forces and similar body movements on the two diagonals. However, a lame horse is likely to be reluctant to carry equal weight and/or provide equal propulsion on both diagonals. Body movements will then become asymmetrical. In a weight-bearing lameness, such as a hoof abscess, the injured limb will be less loaded, and the body will sink less during its stance phase. If the horse has an injury that affects propulsion, such as a tendon injury, the injured limb will generate a smaller push-off GRF and the body will not be raised as high into the air. The effects of an injured forelimb are seen primarily in the movements of the poll, whereas the effects of a hind limb injury are seen mainly in the movements of the pelvis. This is the principle upon which the use of the Sleip system is used to locate the lame limb, assess the severity of lameness and differentiate between weight-bearing and propulsive types of lameness.
In order to ride harmoniously, riders must learn how to move their pelvis to absorb the horse’s motion and avoid bouncing in the saddle. The trot is the most difficult gait to sit in harmony with the horse because the GRFs create large and frequent vertical oscillations combined with high braking and propulsive forces acting synchronously in the diagonal limbs. No wonder it’s difficult to sit the trot!

Veterinarian, researcher, and horsewoman Dr. Hilary Clayton, BVMS, PhD, Dipl. ACVSMR, FRCVS is a legend. For over 40 years, she’s carried out research in the areas of locomotor biomechanics, ameness, rehabilitation, conditioning programs for equine athletes, and the interaction between rider, tack, and horse. A lifelong rider, she’s also competed in many equestrian sports.




